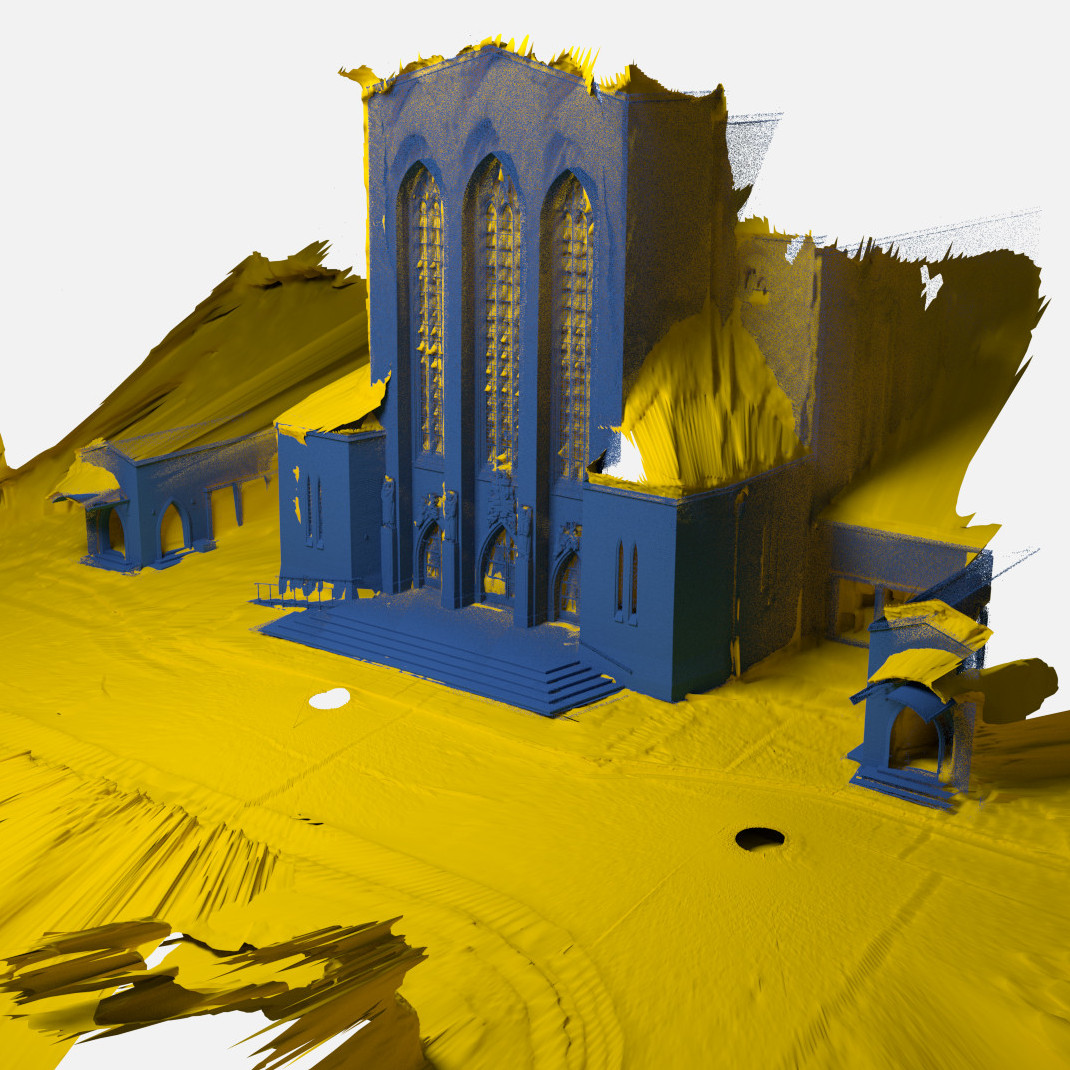
This project aims at studying efficient and reliable methods for 3d point-cloud registration. We focus on global pairwise registration, ie. on the estimation of the relative pose between two point-clouds without considering an initial transformation guess.
Job offer
- Google Summer of Code 2020: https://github.com/CGAL/cgal/wiki/Project-Ideas#extend-cgal-point-cloud-registration-to-multiple-objects
Participants
- Nicolas Mellado
- Jie Shao
Software
- OpenGR: an Open-source Global Registration library [github]
Related publications
Journal of Cultural Heritage, 2018
IEEE Transactions on Visualization and Computer Graphics, 2015
Computer Graphics Forum, 2014
VAST 2010 - The 11th International Symposium on Virtual Reality, Archaeology and Cultural Heritage. Nombre pages : 6