The Cortexionist architecture
My Ph.D was funded by the french government and supervised by Hervé Luga and Pr. Yves Duthen from the VORTEX research team at IRIT between 2003 and 2006.Motivation
Neural network-based architectures provide a model to the nervous system which is well suited for the control of autonomous artificial creatures. A perceptron for example integrates well as a behavioural controller, conveying the signal provided by the sensors to the actuators along its connections. By means of a training procedure (traditionally a back-propagation algorithm), the agent learns to behave consistently in the virtual environment.
However, what the agent fails to do well, is learning from its environment, like living beings. The agent's knowledge is dependant on cognitive modelling and/or the definition of affordances in an "informed" environment. In the video on the right, this weakness is illustrated by the fact the agent (the green creature), despite being able to run away when attacked, is still unable to learn the predator (in purple) is harmful. In essence, the Agent ignores what it has not been explicitly taught
Proposition

The Cortexionist project is an attempt to understand how intelligence can emerge from the ability to detect, store, and make use of structures and regularities inside the environment.
Cortexionist is an animation controller based on the study of human memory. Cortexionist is basically a perceptron integrating an associative memory in order to handle action selection as well as inner representations. The aim of such a model is to illustrate the role of the environment in the creature behavior, particularly when this behavior is the result of an adaptation process.

The controller benefits from two different learning strategies. First, a supervised process trains the network to bind perceptions to actions. The result is visible by the weights on the connections between the input layer and the output layer.
Once the agent introduced in the environment, a second unsupervised learning occurs. It consists in creating patterns of knowledge by associating features the agent observes during its lifetime.
Those patterns are used during the action selection by generalising the primary behaviours of the agent, with respect to the newly formed knowledge.
Results
The video clip below shows the result of some toy prey-predator experiments where an agent learns to recognise surrounding creatures, and tailors its behaviour accordingly. Cortexionist provides the agent with the structures it needs to build inner representations of its environment and then use them to enhance its behavior abilities.
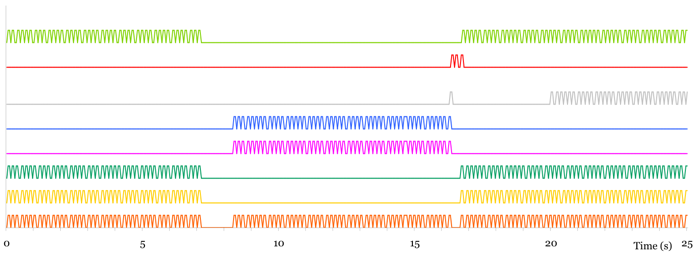
A comparison between the activity diagrams of a purely reactive agent and the Cortexionist agent demonstrates that more relevant actions are triggered by these two agents in a similar context (e.g. same perception, same initial behaviour), proving the better adaptation of the Cortexionist agent to its environment.
Links