We will produce the "model" of this form, against the purposes of the Generalized Hough Transform.
To do this, complete the function below: parts with "...".
To have more information, do not forget to read the comments.
|
We will produce the "model" of this form, against the purposes of the Generalized Hough Transform. To do this, complete the function below: parts with "...". To have more information, do not forget to read the comments. |
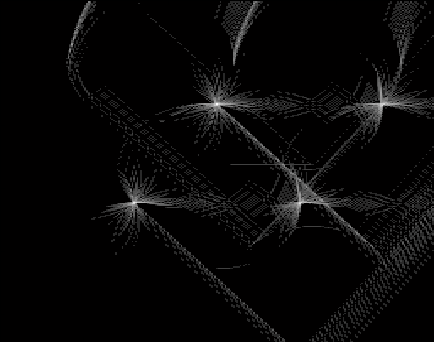
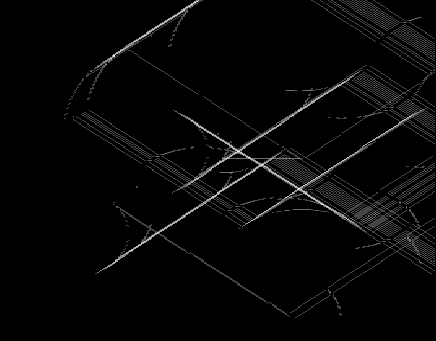
| Binary image | Voting space |
|
 |
 |
 |
 |
 |
 |
 |