Sujets de BE. L3 - Univ. Toulouse III
La compétition Drive
ToGaether a été organisée à Toulouse lors de la Conférence Nationale
d'Intelligence Artificielle en 2019 et sous-forme de Jam à Strasbourg en
2023.
Nous vous proposons de travailler pour
simuler une participation à cette compétition.
L'intelligence artificielle s'intéresse depuis ses débuts à donner des comportements
intelligents aux machines et donc aux robots. Suite au succès rencontré il y a
trois ans par les étudiants
de L3 informatique de Toulouse lors de la compétition IA sur robots organisée par l'AFIA, nous souhaitons
profiter du savoir faire toulousain pour aller plus loin dans ce domaine.
Nous
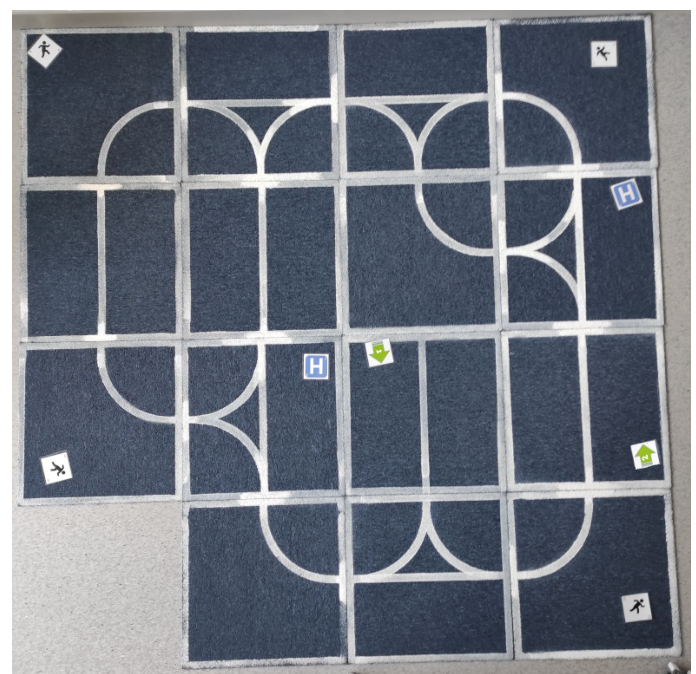
organiserons des compétitions entre vous. L'objectif est de faire
circuler ensemble des véhicules autonomes et des véhicules télécommandés afin
qu'ils puissent réaliser une tâche commune, ici amener des victimes vers des
hopitaux. Les robots suivent des lignes au sol. Chaque équipe contient un robot télécommandé et un robot
autonome. Ils doivent ensemble sauver le plus de victimes.
La liste non-exhaustive des tâches à effectuer est la suivante :
- programmer une interface pour piloter un robot à distance (sur
smartwatch, smartphone, ordinateur ou tablette (non fournis))
- réaliser un logiciel qui pilotera un robot. Ce robot devra s'adapter à
son équipier robot (piloté par un humain)
afin que leur équipe sauve le plus possible de victimes dans une période de
temps donnée.
- réaliser un logiciel qui permet de simuler ce problème sur un écran avec
deux robots virtuels l'un piloté par un humain l'autre autonome.
Attendus :
- Il sera demandé de déposer votre
code sur un site de partage de code comme GitHub (vous pourrez d'ailleurs consulter les programmes
réalisés par les étudiants des années précédentes qui y ont été déposés.)
- Nous aimerions qu'au moins deux binômes participent à la compétition nationale
DriveToGaether
Nombre max d'étudiants: 7 étudiants travaillant en binômes pour 4/5 mbots
Encadrement : Florence Bannay
 Déroulement du BE:
Déroulement du BE:
Nous vous invitons à passer à l'IRIT Mardi 6 avril à 9h pour une réunion de démarrage d'une heure.
- cela nous permettra de vous fournir le matériel (robots + moquette) à amener dans la salle
- par binôme, vous devrez disposer d'un appareil offrant une connection
bluetooth et wifi sur lesquel vous avez les droits administrateur afin de
pouvoir envoyer les instructions aux robots
- pour vous avancer vous pouvez jeter un oeil aux réalisations effectuées les années précédentes (répertoriées ci-dessous)
- vous pouvez également commencer à réfléchir aux différents défis à relever (il faudra ensuite prévoir des mini-compétitions/démonstrations toutes les 2/3 semaines).
Depuis 2016 nous avons eu plusieurs binômes qui ont travaillé sur les robots légos, les codes sources sont accessibles:
- 2021 DriveToGaether
Clément Besset et Esteban Petre projet OwOmega ( vidéo )
- 2021 DriveToGaether
Rémi Petiiot, Nathan Stievano et Florian Garcia-Torrejon projet
Legopotes (vidéo )
- 2019
Drivetogaether Alexandre Fiche
- 2019
Drivetogaether Pierre Gavrilov et Jacques Rémi
- 2019
Drivetogaether David Latil
- 2018 Robot deux roues,
photos
et videos
- 2018 IA sur Robots Legos, BTCommunication
- 2018
https://github.com/Rollafon/ambulanceRobotSimulator, https://github.com/gauvainrobert/RobotAmbulance
- 2018 https://github.com/MAnzilane/BE_IA
- 2018 https://github.com/SebastienNiarfeix/BE_RobotIA
- 2018 https://github.com/OusmaneDRAME/IARobotsLego
- 2017 https://github.com/lepapyfoufurieux/robot-lego
- 2017 https://github.com/aureliengaillard/Robot-Gary
- 2017 (pas sous github):
- 2016 http://benja135.xyz/blog/cartographie-et-sortie-labyrinthe
et un étudiant qui a travaillé sur le robot 2 roues,
le dossier
contient des exemples de test, le rapport de l’étudiant (très mal rédigé) et le code Java.
Références issues des rapports d'étudiants :
Documentation à propos du robot modèle NXT :
- Généralités
- Bluetooth
- Configuration Eclipse
Aide à la réalisation du path-finding :
Précédents projets utilisant le Lego Mindstorm :