Master's research
My master's research activities were supervised by Hervé Luga in the VORTEX team at IRIT between 2002 and 2003.
Genetic evolution of behavioural controllers
Neural networks are usually good candidates for instantiating a behavioural controller for they fit the structures and the operating mode of the nervous system. Perceptrons offer an easy integration between the sensors and the actuators of a virtual creature, owing to a layered structure perfectly adapted for binding the perception of the agent to its action abilities
However, perceptrons cannot be designed by hand and thus require to be trained, by a back-propagation algorithm or an evolutionary process evolving a population of candidate network controllers. Traditional evolution fails to converge towards anything usable for two reasons: a limited genotype's representation and unadapted evolutionary operators, both responsible for a major part of the offspring to be disabled individuals.

Proposition
Our proposition first considers a suited genotype which allows for the representation of various kinds of neural controllers.
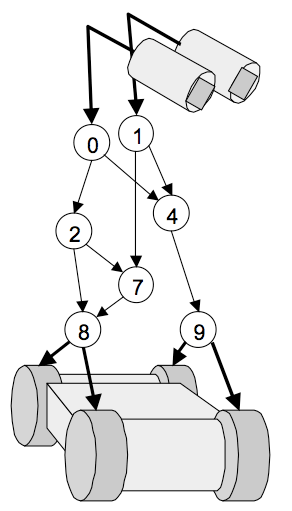
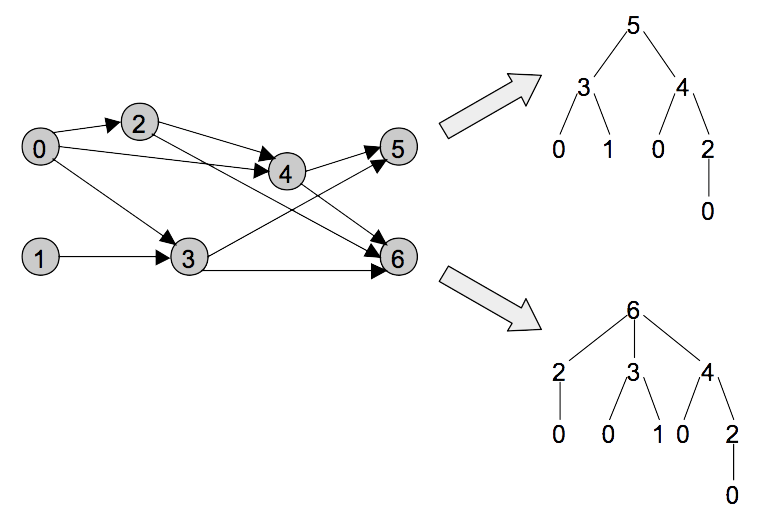
Using this representation, backtracking trees can be extracted, one for each output neuron, composed by all the connections backwards to the input neuron(s).
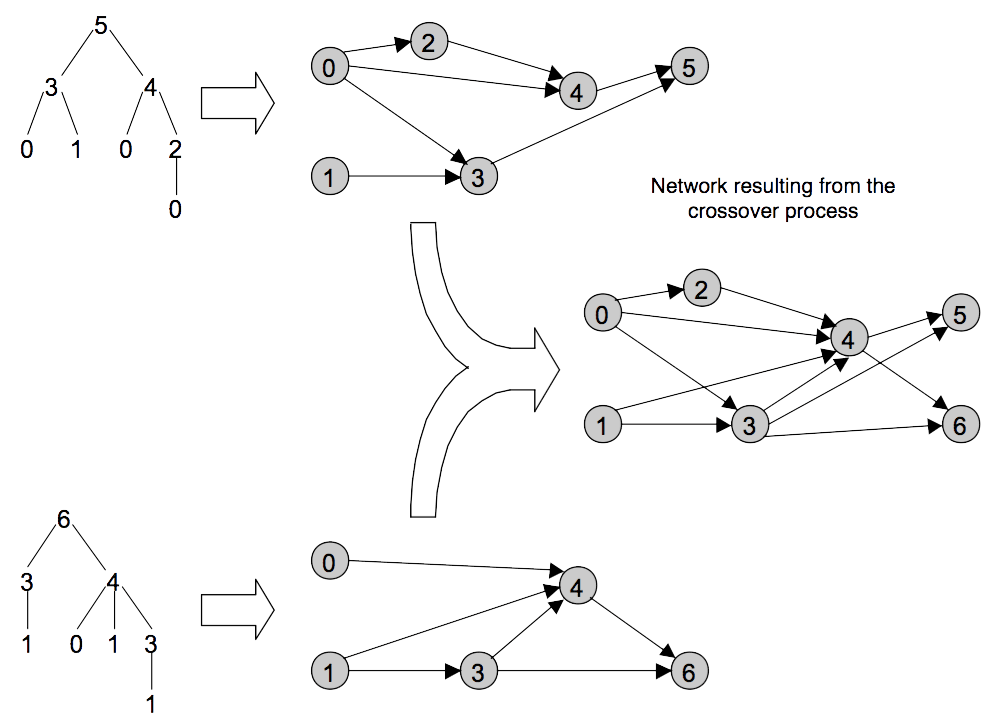
Those trees then participate in the recombination of new individuals (new controllers) owing to a tailored crossover operator. One hundred percent of the offspring are valid networks, as opposed to the poor results of traditional crossover.
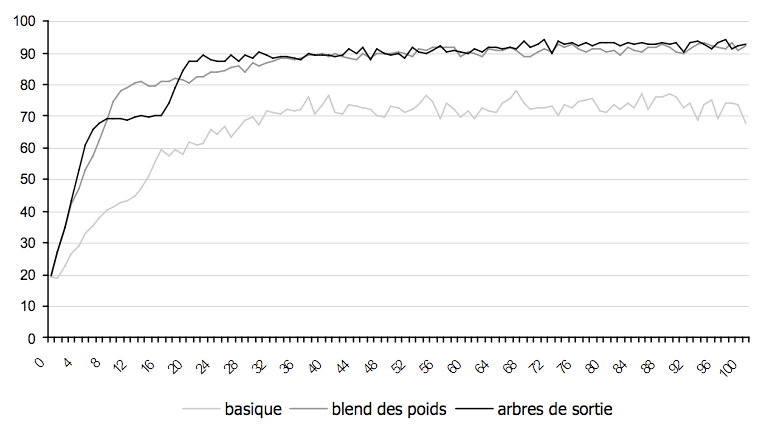
As a result, the fitness converges significantly quicker towards an optimal solution.
Video clip
The video clip below shows some of the results we obtained training a mobile robot to track fixed or mobile lights in a virtual environment.