
Research internship: semantic segmentation of power lines in UAV lidar point clouds (job offer closed)
6 months – Master 2 Research Internship.
STORM research group, CNRS, IRIT, Toulouse.
Contact: nicolas.mellado AT irit.fr

Context
The company YelloScan design, develop and manufacture UAV LiDAR systems for professional applications. Fully integrated, ultra-light and easy to use, these highly automated data collection tools are employed by customers around the world in fields such as surveying, forestry, environmental research, archeology, industrial inspection, civil engineering and mining. In order to quickly develop our activities at very high standards both in terms of products and services, we are looking for talented people to join our teams. In this context, we propose this internship, co-supervised between the STORM research group and Yellowscan.
Project description
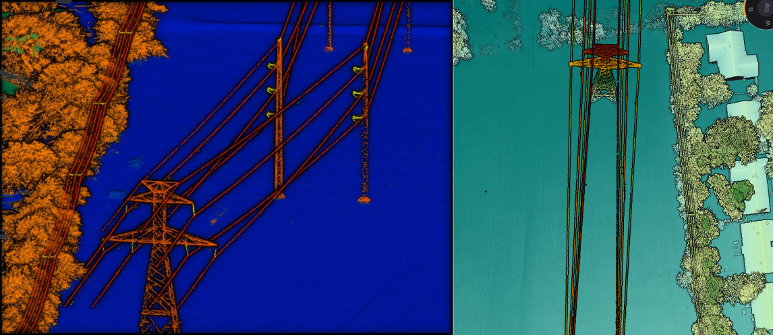
LiDAR is a remote sensing technology widely used in Geographic Information System. Georeferenced acquired point clouds allows the monitoring of large-scale infrastructures such as road, railroads and power lines networks. For the latter, monitoring the vegetation growing nearby the lines and plan trees trimming is mandatory to ensure reliability and safety of the network.
The goal of this internship is to develop an approach to automatically segment power lines and their supporting structures (pylons, insulators) in 3d point clouds. The approach will be based on local geometric descriptors adapted to these structures, and the use of machine learning approaches to classify points in interesting semantic classes.
Skills
- Strong programming skills (modern C++)
- Organization, methodology and autonomy
- Linear algebra
- Knowledge in Computer Graphics or Computer Vision required,
- Knowledge in Machine Learning, Statistics and Applied Mathematics
Related work
Point cloud Scale-Space analysis using Machine Learning
Chems-Eddine Himeur, Thibault Lejemble, Thomas Pellegrini, Mathias Paulin, Loic Barthe, et al.. PCEDNet : A Lightweight Neural Network for Fast and Interactive Edge Detection in 3D Point Clouds. ACM Transactions on Graphics, Association for Computing Machinery, 2022, 41 (1), pp.1-21. ⟨10.1145/3481804⟩. ⟨hal-03349971⟩