
Research internship: Anisotropic Scale-Space (job offer closed)
6 months – Master 2 Research Internship.
STORM research group, CNRS, IRIT, Toulouse.
Contact: nicolas.mellado AT irit.fr
PhD opportunity at the end of the internship.
Context
Some decades ago, the advent of digital photography led to the formation and development of dedicated research fields (e.g., image processing, pattern recognition, computer vision), which have revolutionized our daily lives. We believe that, in a near future, 3d acquisition will have a similar impact than digital photography.
The acquisition technology is now mature and is currently being rolled out for the general public, the industry and research. For instance, the Lidar market is continuously growing, with high demand from the automotive and electronics industries (e.g., smartphones), agricultural machinery, among other. In the past few years, the cost of a Lidar unit has been divided by 100, and 3d acquisition devices and reconstruction techniques are now embedded in mobile devices, robots, trains and cars, planes, and satellites (e.g., CO3D, deployed in 2022 by the CNES, will offer 1 meter and 50 centimeter accuracy in elevation and space, respectively).
The multiplication of the acquisition solutions mechanically leads to an increase of the amount of acquired data, for instance country-wide landscapes and city mapping for GIS applications, building monitoring for civil engineering and Cultural Heritage applications, indoor mapping for Augmented Reality and robotic exploration, object acquisition for digital fabrication or retro-engineering. In all cases, the acquisition process generate the same type of data, called 3d point clouds, and which are simple unordered collection of 3d coordinates, possibly augmented with attributes (e.g., colors, reflectivity).
Project description
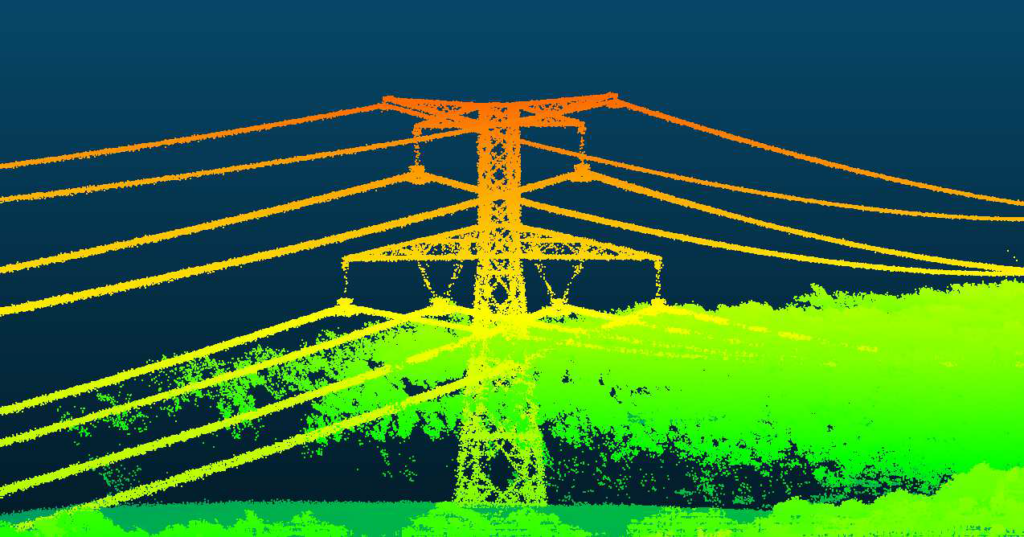
As shown in the right inset, the shapes sampled by 3d point clouds may vary a lot depending on the use case, e.g., arrangements of curves (power lines), surfaces (ground) and volumes (foliage). The aim of the SSLAM project is to propose a unified and scalable analysis framework for acquired 3d point clouds, combining Machine Learning (ML) and geometric multi-scale analysis approaches.
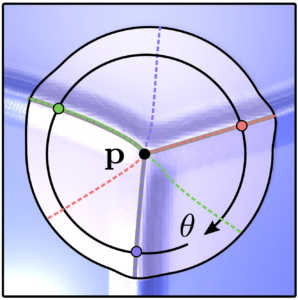
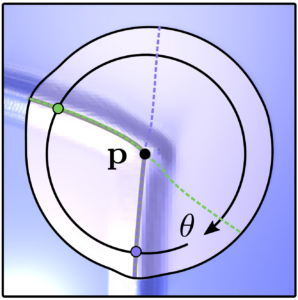
During this internship, we will specifically focus on the analysis of anisotropic shapes: e.g., curves and cylinders. Specifically, the intern will be in charge of 1. extending the standard definition of scale (i.e. the surface reconstruction kernel that is spatially isotropic) to anisotropic kernels, and 2. studying its parametrization (e.g., polar) and the impact on the Scale-Space.
Skills
- Linear algebra
- Knowledge in Computer Graphics and/or Computer Vision
- Strong programming skills (modern C++, Cuda)
- Bonus: Experience in 3d point cloud analysis/processing
Related work
Scale-Space construction from 3d point clouds
Nicolas Mellado, Gaël Guennebaud, Pascal Barla, Patrick Reuter, Christophe Schlick. Growing Least Squares for the Analysis of Manifolds in Scale-Space. Computer Graphics Forum, Wiley, 2012, Proceedings of Symposium on Geometry Processing 2012, 31 (5), pp.1691-1701. ⟨10.1111/j.1467-8659.2012.03174.x⟩. ⟨hal-00713678v2⟩
Point cloud Scale-Space analysis using Machine Learning
Chems-Eddine Himeur, Thibault Lejemble, Thomas Pellegrini, Mathias Paulin, Loic Barthe, et al.. PCEDNet : A Lightweight Neural Network for Fast and Interactive Edge Detection in 3D Point Clouds. ACM Transactions on Graphics, Association for Computing Machinery, 2022, 41 (1), pp.1-21. ⟨10.1145/3481804⟩. ⟨hal-03349971⟩
PONCA: POiNt Cloud Analysis library
Ponca is a header only library coded in C++, and compatible with CUDA. It is maintained by researchers in Computer Graphics, and released under the MPL license. Source code is available at: https://github.com/poncateam/ponca